LetsGo阅读笔记(有LiDAR辅助的适用于大范围停车场的重建框架)
总结:Lidar-IMU-Camera构建点云地图,转成mesh,得到RGB深度,渲染3DGS
相关文档
- 项目链接:https://zhaofuq.github.io/LetsGo/
- 代码链接:https://github.com/zhaofuq/LOD-3DGS
- 论文链接:https://dl.acm.org/doi/pdf/10.1145/3687762
Introduction
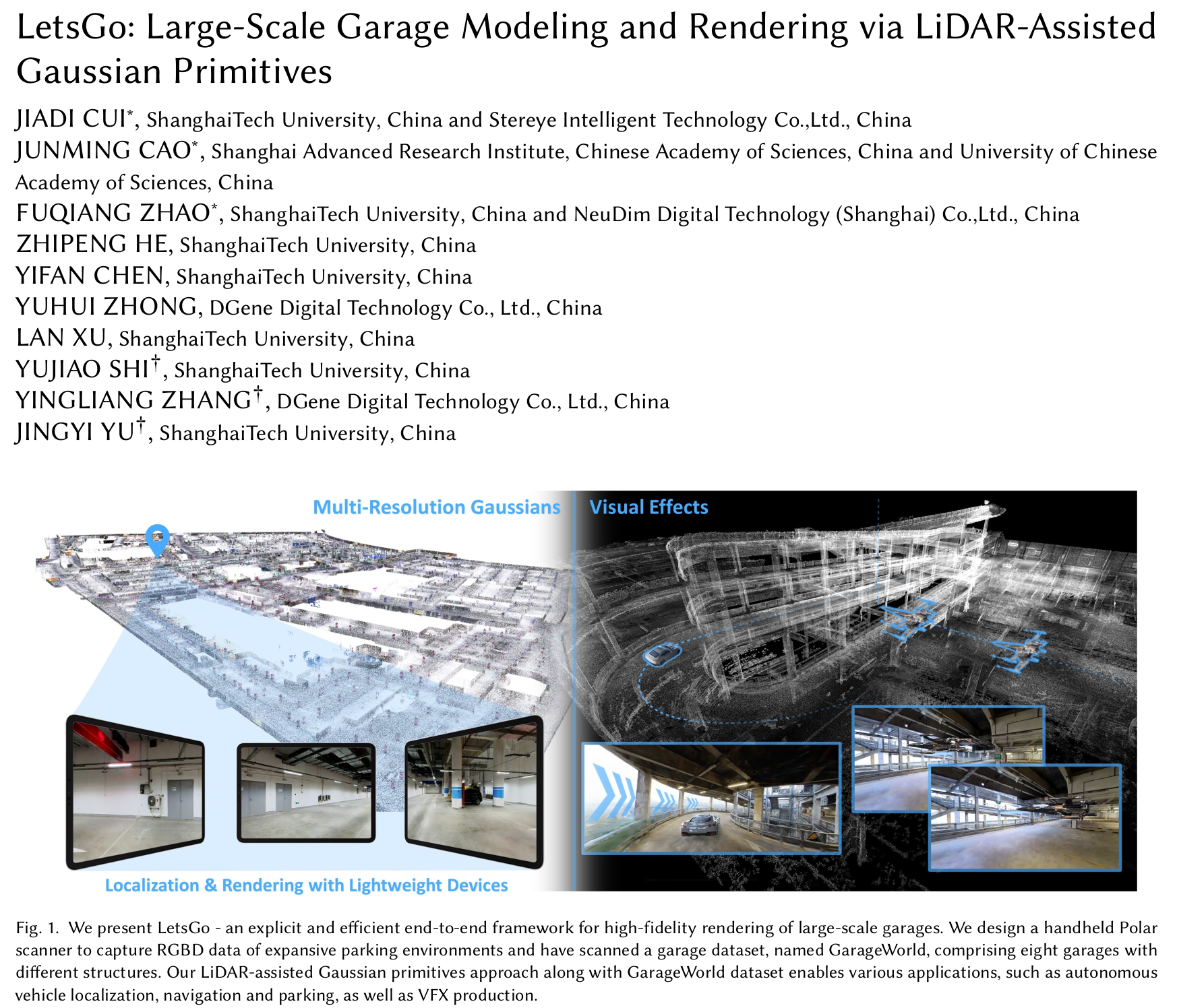
- 本文的主要目标场景是停车场,停车场有光照条件差、表面无纹理和反射表面的问题,传统的SFM和MVS方法在这种场景中没法提取足够的特征,导致重建效果不佳。基于LiDAR的方法当出现反光表面和透明玻璃时,几何估计也会有比较大的问题,并且激光会更稀疏,会丢失高频细节。
- 本文的主要特点是把LiDAR的点云集成到3DGS的框架中,并利用LiDAR的深度先验计算depth正则项,减少重建后的“浮点”。
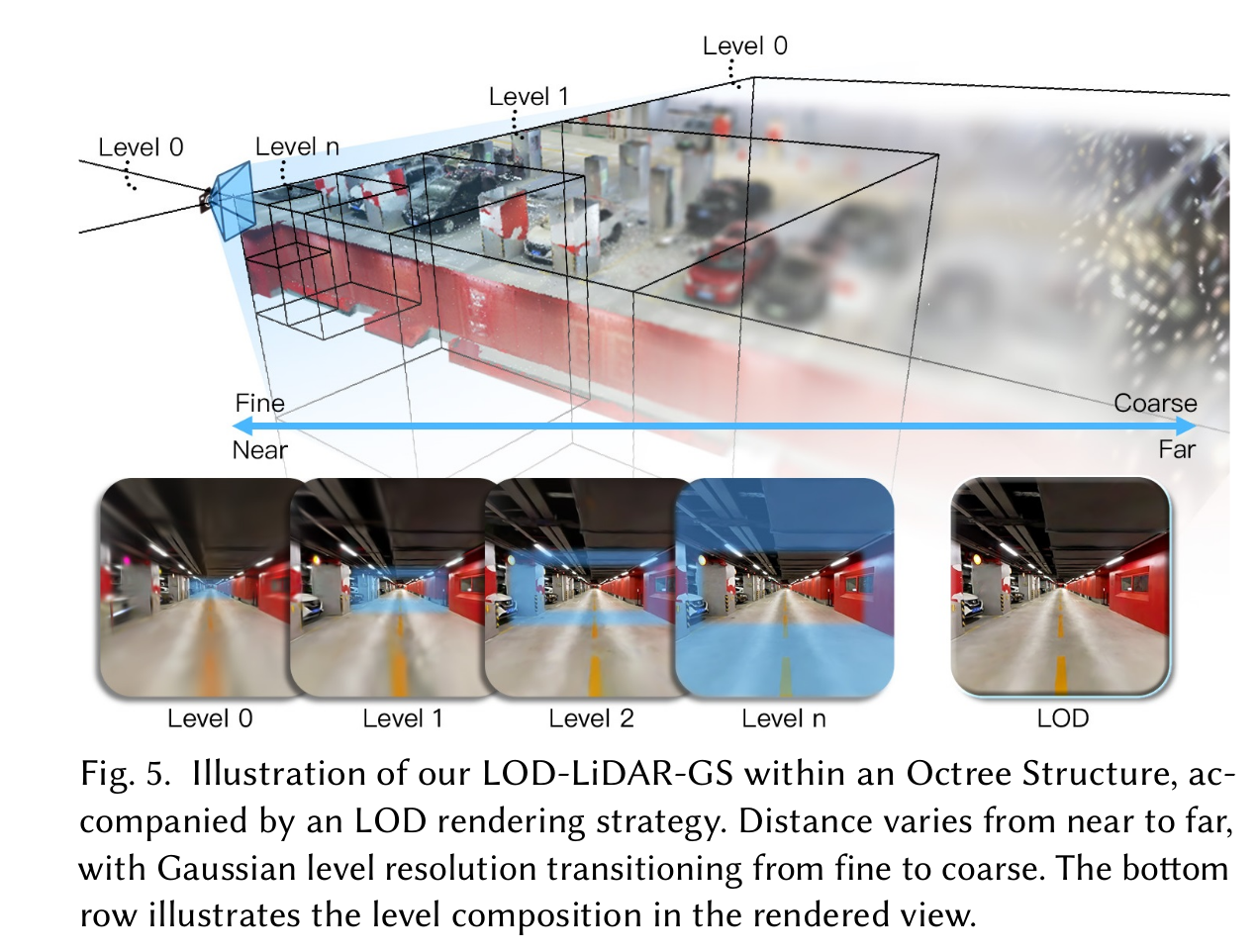
- 由于场景过大,有可能导致GPU OOM,因此作者还提出了一个多分辨率的3DGS表示。低分辨率3DGS捕捉场景的粗略结构;高分辨率3DGS捕捉细节。同时在渲染阶段,作者引入了一种级别选择策略,通过考虑3DGS和渲染视点之间的距离来优化视觉质量和设备性能之间的平衡。相对于原始的3DGS,该方法渲染速度快了4倍。
Method
Initial Mesh Reconsruction(mesh初始化)
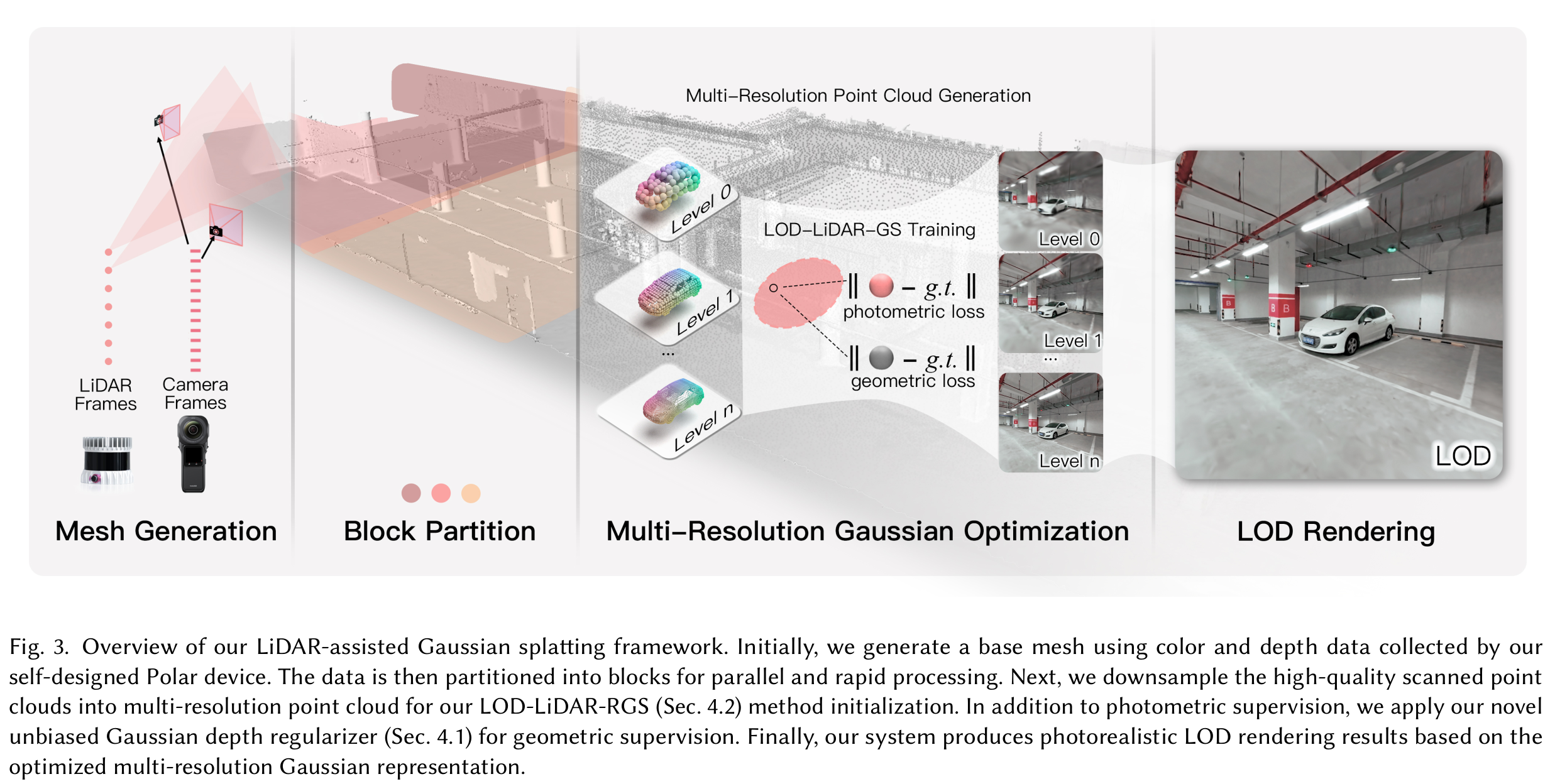
- 作者使用LVI-SLAM得到全局点云地图+RGB颜色,然后使用泊松重建得到初始的mesh。同时把mesh和原始的点云对比较,删掉不正确的mesh面。
- 个人认为,这里是不是用NVIDIA的NKSR来生成mesh效果会更好?
Gaussian Splatting with LiDAR Inputs(有LiDAR辅助的Gaussian Splatting)
- 考虑到原始的点云地图会有一些噪点,作者这里在泊松重建后的mesh上重新采样一组点云作为深度信息。并且利用采样后的深度信息与GS的depth信息额外计算了一个深度loss,和RGBloss一起训练。
Multi-Resolution Represtration(多分辨率表示)
- 对点云地图做多分辨率的降采样,最精细的分辨率是4cm,然后8cm, 16cm, 32cm… 直到点云个数少于1万个。
- 每个分辨率用一个独立的GS模型表示,在渲染时根据视点距离选择合适的分辨率。
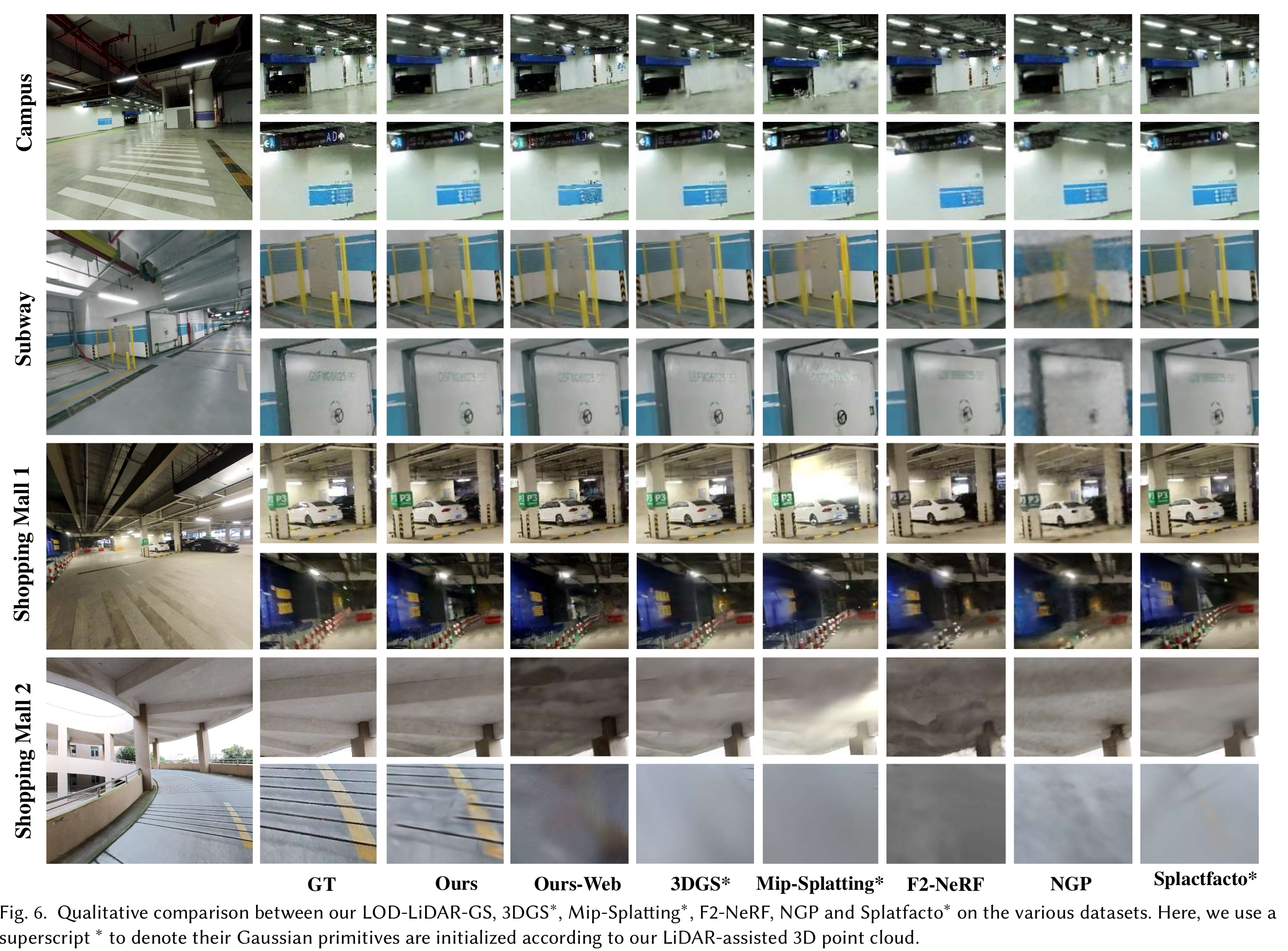
Expeirment
LetsGo阅读笔记(有LiDAR辅助的适用于大范围停车场的重建框架)
https://fansaorz.github.io/2025/02/05/LetsGo阅读笔记/