GSDF阅读笔记(将重建分成SDF和3DGS两个子模块,互相促进)
相关文档
- 项目链接:https://city-super.github.io/GSDF/
- 代码链接:https://github.com/city-super/GSDF
- 论文链接:https://arxiv.org/pdf/2403.16964
Introduction
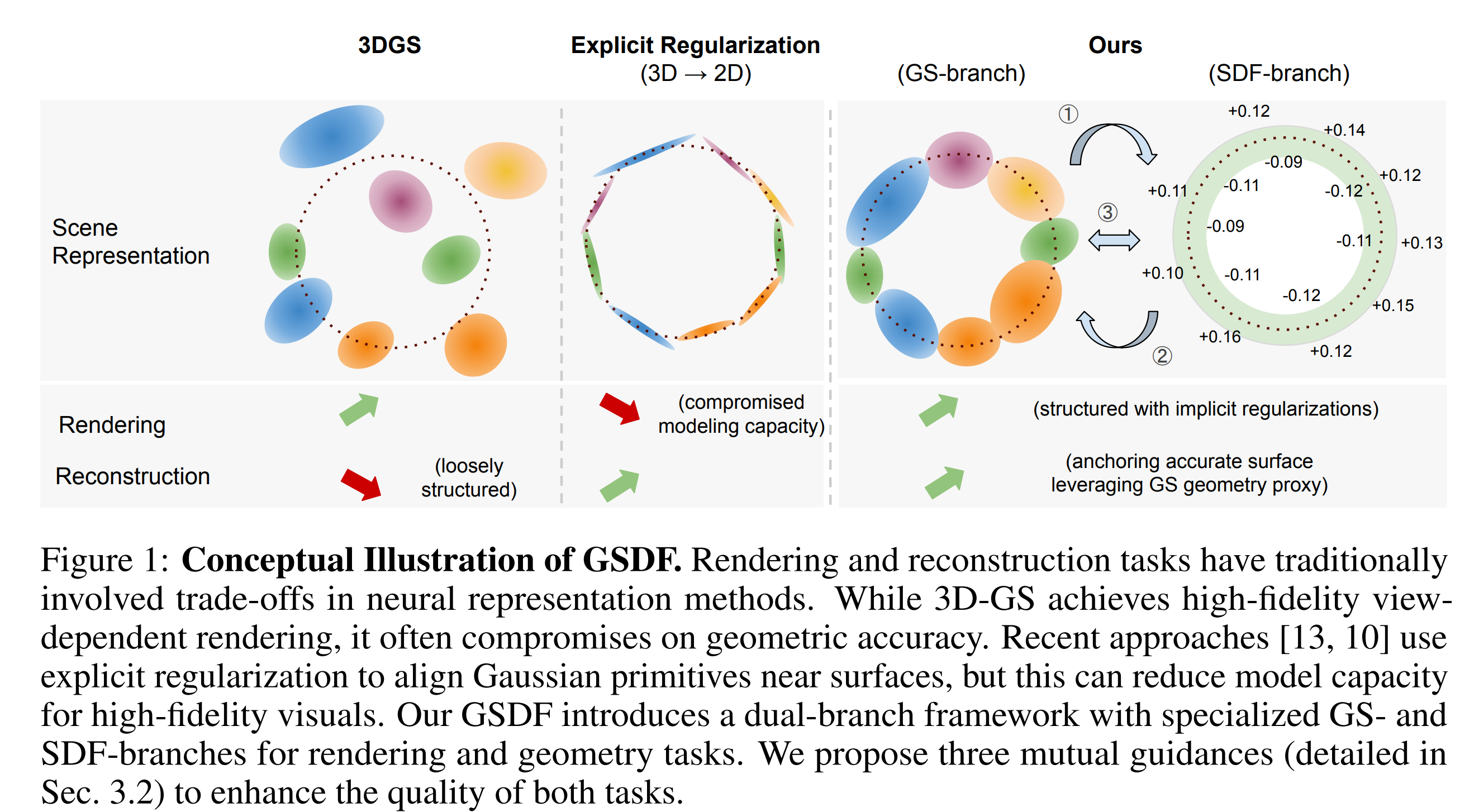
- 作者提出,目前的视觉重建方法在物体的几何精度和画面的渲染精度上有一个“优先级匹配”的问题,目前二者是耦合在一起的,如果我们为这个系统整体添加正则项或者约束,可能某一个方面的质量会提升,而另一个方面则会下降。
- 目前已经有一些方法试图解决这个问题,例如:Neusg和Sugar都是用2维的扁平高斯基元进行表面重建。Sugar使用了强制二元不透明度,Neusg使用联合学习的NeuS模型来正则化属性,但是这些约束都导致了渲染质量的下降。
- 然而,诸如Adaptive Shell(自适应壳[Adaptive shells for efficient neural radiance field rendering]),Binary Occupancy Field(二元占用场[Binary opacity grids: Capturing fine geometric detail for mesh-based view synthesis])和Scaffold-GS都表明,通过融合几何引导,可以生成具有良好正则化的空间结构,进而显著的提升渲染质量。(TODO:没太看懂这块,先往后看,再回来修改)
- 基于以上见解,作者提出了一个同时优化的双分支(Dual-branches)系统,分别是用于做渲染的3DGS分支和用于做表面重建的SDF分支。主要做了三个改进:
- 从3DGS分支的光栅化深度来引导SDF分支的光线采样,加强提渲染的效率和避免局部最小值
- 用SDF来控制3DFS的密度,引导3DGS在表面附近的增长,在其他地方剪枝
- 对齐两个branch的几何结构(深度和法向)
GSDF阅读笔记(将重建分成SDF和3DGS两个子模块,互相促进)
https://fansaorz.github.io/2024/12/27/GSDF阅读笔记/